
سيميولينك
| نوع | |
|---|---|
| نظام التشغيل | |
| المطورون | |
| موقع الويب |
| الإصدار الأخير |
|
|---|---|
| الملفات المقروءة | |
| الملفات المنتجة |
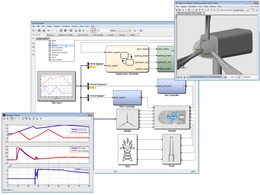
سيميولينك (بالإنجليزية: Simulink) هو برنامج للنمذجة والمحاكاة وتحليل الأنظمة الديناميكية، سواء كانت خطية أو غير خطية ويقوم أيضًا بنمذجة الأنظمة سواء في الزمن المستمر أو في الزمن غير المستمر.[1]
وباستخدام السيميولينك يمكن بناء نماذج من البداية أو التعديل على أنطمة موجودة بالفعل، والفائدة من ذلك هو دراسة خصائص نظام التحكم أوالمنظومة قبل البدء في التنفيذ لتحديد طبيعة استجابة النظام للمدخلات، ومن ثم تصميم نظام تحكم مناسب وضبطه.
والسيميولينك ليس مقتصرًا على التحكم وتطبيقاته، وإنما يحتوى على مجموعة صناديق (بلوكات) تغطي أغلب تطبيقات الهندسة الميكانيكية والكهربية وهندسة الطيران.
وهو من أفضل برامج التصميم على أساس النمذجة، وهو ليس فقط قاصرًا على الأنظمة المثالية، ولكن يمكن أيضًا من نمذجة أنظمة تحاكي الحقيقة بها عوامل موترة وموثرة تجعلها غير خطية مثل الاحتكاك أو مقاومة الهواء أو انزلاق التروس أو تقلب درجة الحرارة أو تداخل تردد نقل الكهرباء إلخ، حسب مجال النظام وهدف التحكم.
في البرنامج العديد من الأمثلة لشرح عمل أغلب التطبيقات، يمكن استخدامها أو التعديل عليها.
وللسيميولينك واجهة مستخدم رسومية أسهل في التعامل معها من التشفير المباشر مثلا، ويقوم المستخدم بسحب البلوكات المرادة إلى ساحة النموذج وتوصيلها بسحب الفأرة وتغيير خصائص البلوكات بالضغط عليها أو عمل بلوكات مفصلة خصيصًا للنموذج المراد باستخدام ما يسمى (دوال النظام) S-function.
بعد بناء النموذج، يشغّل لمحاكاته بطريقة يمكن تحديد تفاصيلها من زمن وطريقة التكامل التي تكون في non-real time، ويمكننا أيضا عمل محاكاة للنماذج في ال real time، وهذا باستخدام مجموعة البلوكات الموجودة في البرنامج باسم Xpc Target و Real Time Workshop.
ويمكننا التحكم في المحاكاة بواسطة سطر أوامر الماتلاب، وهذا يكون مفيد جدا في حالة الرغبة بعمل المحاكاة لأكثر من نموذج، وويمكن تخزين النتائج واستخدامها مع ال Toolboxs الموجودة في الماتلاب.
مراجع
[عدل]- ^ "معلومات عن سيميولينك على موقع d-nb.info". d-nb.info. مؤرشف من الأصل في 2019-08-31.
وصلات خارجية
[عدل]| في كومنز صور وملفات عن: سيميولينك |